MKY44 リモート位置決め
I/Oレベルのネットワークでも簡単に位置決め制御
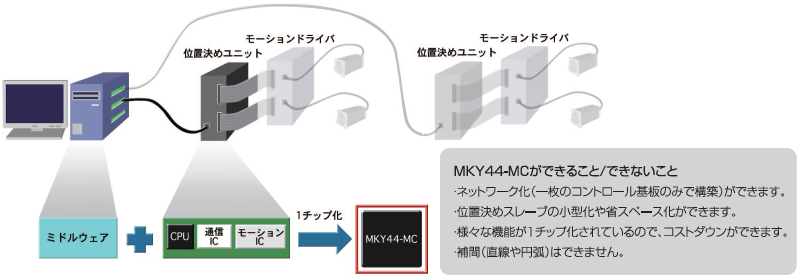
MKY44-MCシリーズは、ミドルウェアを含んだ位置決めユニットの機能を1チップ化しました。
これにより、I/Oレベルのネットワークにおける制御が新たに追加されました。
位置決め制御をI/Oレベルのネットワークでも実現できるMKY44-MCシリーズは、コストダウンやメンテナンス性の問題を解決します。
MKY44-MC シリーズ
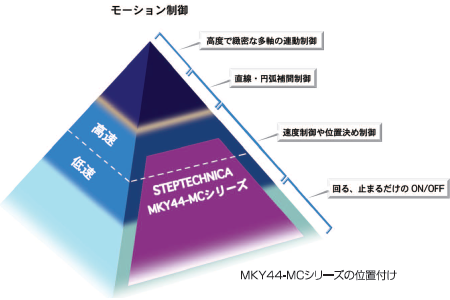
MKY44-MCシリーズは、モータの「回る/止まる」だけのON/OFF制御から、
速度制御や位置決め制御をI/Oレベルのネットワーク上において実現することができます。
例えば32軸の同時制御においても数ミリ秒の運用が可能です。
■製品紹介
用途に合わせてお選びいただけます。
| MKY44-MC01A | MKY44-MC02A |
|---|---|
 |
 |
| ●速度:24kpps ●制御軸数:1 ●ST44SW必要 |
●速度:12.5kpps ●制御軸数:2 ●ST44SW必要 |
■ミドルウェアを含んだ位置決めユニットを1チップ化
通常、位置決めユニットを制御するために必要なマスタ側のミドルウェアを、スレーブIC(MKY44-MCシリーズ)に内包したことにより、
ネットワークからのシンプルなコマンドにより位置決め制御が可能になりました。
「例えば、32軸の同時制御においても、数ミリ秒での運用が可能です。」
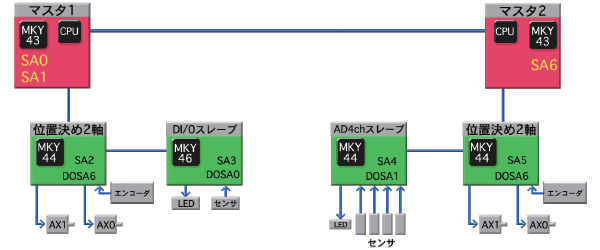
■I/Oレベルのネットワーク上における混在制御
MKY44-MCシリーズによる位置決めは、I/Oレベルのネットワーク上において、
同じI/Oレベルのネットワーク上におけるデジタルI/OやアナログI/Oとの同時制御も可能です。
豊富な機能による簡単位置決め制御
■MKY44-MCシリーズ共通特長
・速度レンジフリー
(PPS:Pulse Per Secondによる速度値を直接指令できます)
・最大64軸の制御が可能
・1軸に付き32種類の動作パターンを登録可能
・パターン補正機能により、目標位置のみを指令する制御も可能
・端末間の多軸同時スタート、ストップなどの同期運転可能
■基本的な機能仕様
○位置決め機能
| 機能 | 制御データ | 機能 | 制御データ | 機能 | 制御データ | ||
|---|---|---|---|---|---|---|---|
| 目標位置 | 直接座標指定、相対座標指定、 メモリ呼び出し座標 |
位置データ | -8,388,608~ 8,388,607(24ビット) |
速度データ | 10pps~12.5kbps/24kbps (1pp単位) |
||
| 加速時間 | 80ms~40.950s | 加速度 | 100pps/s~154.2kbps | 速度精度 | ±0.3%以内 | ||
| 減速時間 | 80ms~40.950s | 減速度 | 100pps/s~154.2kbps | 非対称加減速 | 可能 | ||
| 加減速種類 | S字、直線 | 三角駆動防止 | 有効、無効、設定可 | 出力形態 | パルス列払出し | ||
○エンコーダ入力
・形式:CLOCK/DIRECTIONタイプ
・速度:Max24KHz(MC01A) Max12.5KHz(MC02A)
・位置データ:-8,388,608~8,388,607(24ビット)
○CUnet 対応
・12Mbps/6Mbps/3Mbps 対応
・メール機能による品種問合せ可能
・専有エリア:1または2メモリブロック
・モーションイベント通知など、充実したレスポンスを搭載
○その他
・汎用入力/汎用出力
・同期運転開始入力
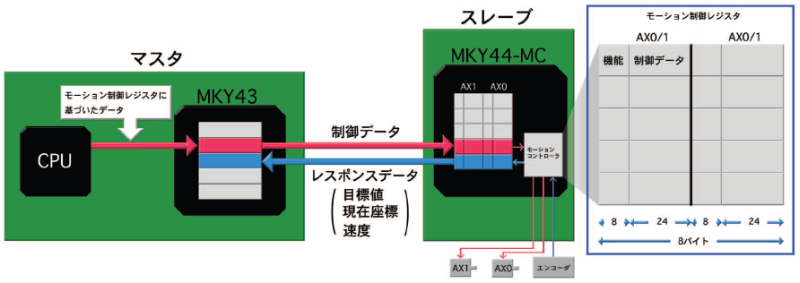
■動作(メモリイメージ)
・動作1:ユーザCPUは、MKY44-MCの命令フォーマットに準じた制御データをMKY43(マスタIC)内のメモリへ書き込みます。
・動作2:書き込まれた制御データは、CUnetを通じMKY44-MC内のメモリへ瞬時に書き込まれます(コピー)。
・動作3:書き込まれた制御データにしたがってMKY44-MC内部のモーションコントローラがモータを制御します。
・動作4:モータの現在座標や速度およびエンコーダ情報は、「レスポンスデータ」として逐次、
MKY44-MC(スレーブIC)内のメモリへ書き込まれます。
・動作5:制御データとレスポンスデータは、CUnetネットワーク上の全端末に共有されます。