MKY44 remote positioning
Easily control positioning even on I/O level network
MKY44-MC Series has integrated the functions of positioning units including the middleware into one chip.
This enables new control on the I/O level network.
Realizing positioning control even on I/O level network, MKY44-MC Series can solve the problems of cost reducation and maintenance.
MKY44 remote positioning series product introductions
Learn about MKY44 remote positioning (MKY44-MC series).
| IC |
 |
Speed: 24 kpps
Number of control axes: 1 No CPU needed No inter polation function Trapezoidal velocity control (Acceleration and deceleration: S-curve, linear) |
 |
Speed: 12.5 kpps
Number of control axes: 2 No CPU needed No inter polation function Trapezoidal velocity control (Acceleration and deceleration: S-curve, linear) |
| MKY44-MC01A |  |
MKY44-MC02A | |
|
| Slave board |  |
|
||
| Communication module | |
|
||
| Pulse generator unit | |
MKY44-MC01A mounted Pulse generator unit |
|
MKY44-MC02A mounted Pulse generator unit |
| CUB Easy+ |
The CUB Easy+ positioning version can be customized to customer specifications. |
|||
MKY44-MC Series
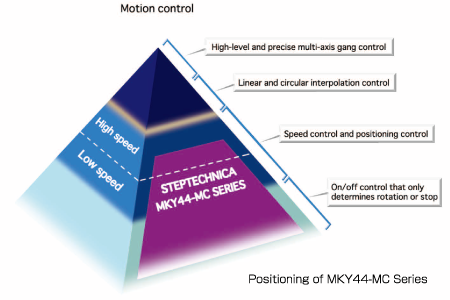
MKY44-MC seriescontrols on/off of motor rotation/stop, speed and positioning on I/O level network.
For instance, a simultaneous control of 32 axes can be operated in a few milliseconds.
■Product introduction
Select products according to the application
| MKY44-MC01A | MKY44-MC02A | ||
|---|---|---|---|
|
●Speed: 24 kpps ●Number of control axes: 1 ●ST44SW: Required |
|
●Speed: 12.5 kpps ●Number of control axes: 2 ●ST44SW: Required |
|
MKY44-MC01A mounted Pulse generator unit |
|
MKY44-MC02A mounted Pulse generator unit |
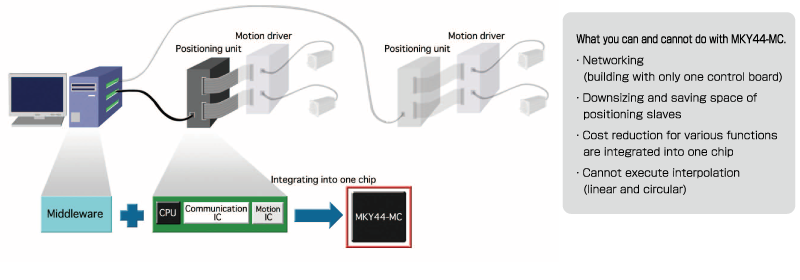
■Integrating positioning units including the middleware into one chip
Integrating the ,aster-side middleware, whitch is normally required to control positioning units,
into slave IC (MKY44-MC Series) enabled positioning control using simple command from the network.
For instance, a simultaneous control of 32 aces can be operated in a few milliseconds.
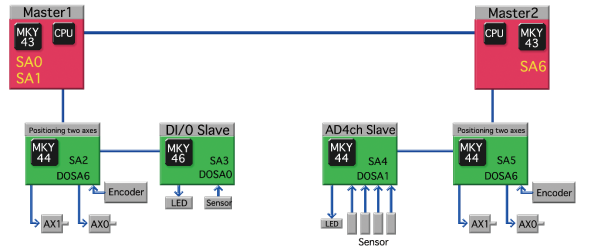
■Mixed control on I/O level network
Positioning with MKY44-MC Series can be concurrently controlled with digital I/O and analog I/O on the same I/O level network.
Easy positioning control with extensive functions
■Common features of MKY44-MC series
・Speed range free
(Directly command the speed value
by PPS: Pulse Per Second)
・Control up to 64 axes
・Register 32 types of operation patterns per axis
・Pattern correction function enables the control
that commands target position only
・Enable synchronized operation such as multi-axis
simultaneous start and stop between terminals
■Basic function specifications
○Positioning function
| Function | Control data | Function | Control data | Function | Control data | ||
|---|---|---|---|---|---|---|---|
| Target position | Direct coordinate designation, Relative coordinate designation, Memory calling coordinates |
Position data | -8,388,608 to 8,388,607 (24 bits) |
Speed data | 10 pps to 12.5 kbps/24 kbps (by the 1pps) |
||
| Acceleration time | 80 ms to 40.950 s |
Acceleration | 100 pps/s to 154.2 kbps |
Speed accuracy | Within ±0.3% |
||
| Deceleration time | 80 ms to 40.950 s |
Deceleration | 100 pps/s to 154.2 kbps |
Asymmetric acceleration and deceleration | Enabled |
||
| Type of acceleration and deceleration | S-curve, linear |
Triangular drive prevention | Enabled, Disabled, Settable |
Output form | Rederence pulse distribution |
||
○Encoder input
・Type: CLOCK/DIRECTION type
・Speed: Max 24KHz(MC01A), MAX 12.5 KHz(MC02A)
・Position data: -8,388,608 to 8,388,607(24 bits)
○CUnet support
・Supporting 12 Mbps/6 Mbps/3 Mbps
・Inquiry for variety by mail function
・Proprietary area: 1/2 memory block
・Equipped with excellent response
such as motion event notification
○Others
・General input/General output
・Synchronized operation start input
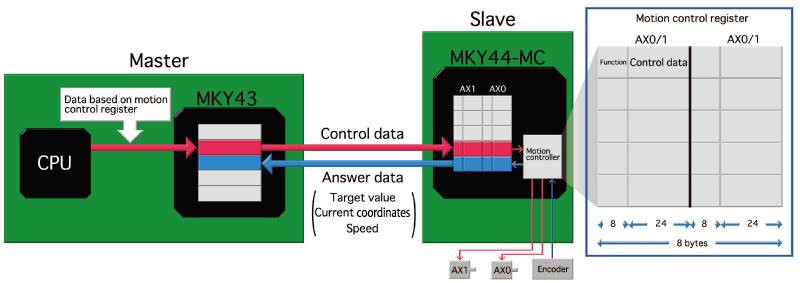
■Operations (Memory Image)
| ・Operation 1 : | User CPU writes the control data compliant to the command format of MKY44-MC in the memory of MKY43 (master IC) |
| ・Operation 2 : | The written control data is instantly written (or copied) into the memory of MKY44-MC. |
| ・Operation 3 : | The written control data controls the motor through the motion controller within MKY44-MC. |
| ・Operation 4 : | Current coordinates, speed, and encoder information of the motor are instantly written in the memory of MKY44-MC (Slave IC) as "answer data". |
| ・Operation 5 : | The control data and answer data are coordinatesshared by all terminals on CUnet network. |